|
RBS
|

|
|
RBS
|
|
HPC의 모든 함수 정의 More...
Functions | |
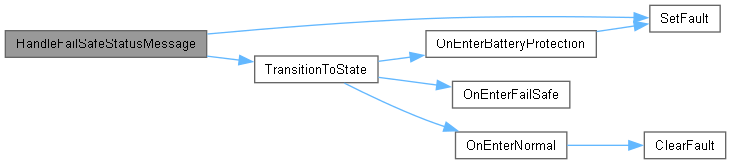
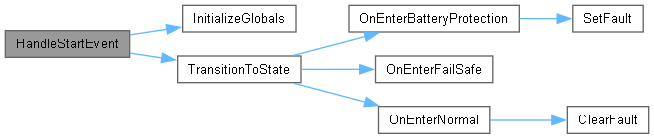
| void | OnEnterFailSafe () |
| Fail-Safe 상태 진입 시 호출되는 함수 | |
| void | OnEnterBatteryProtection () |
| 배터리 보호 상태 진입 시 호출되는 함수 | |
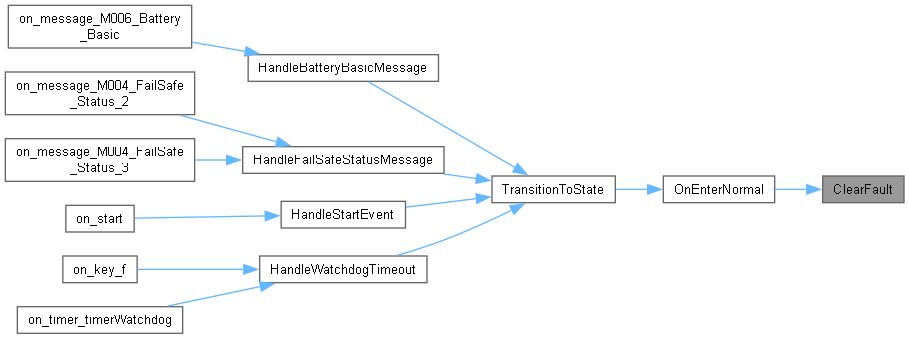
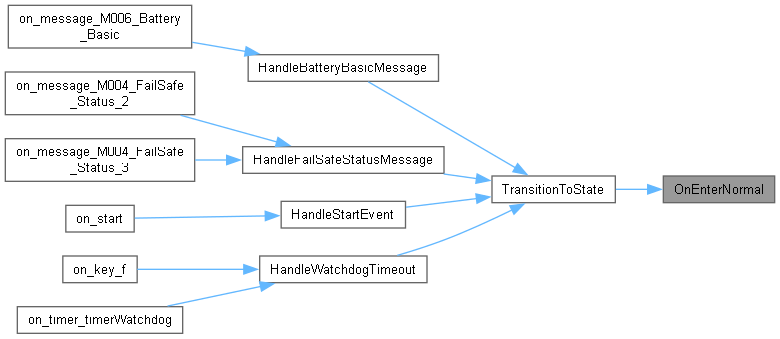
| void | OnEnterNormal () |
| 정상 상태 진입 시 호출되는 함수 | |
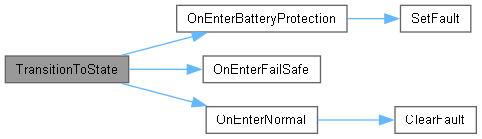
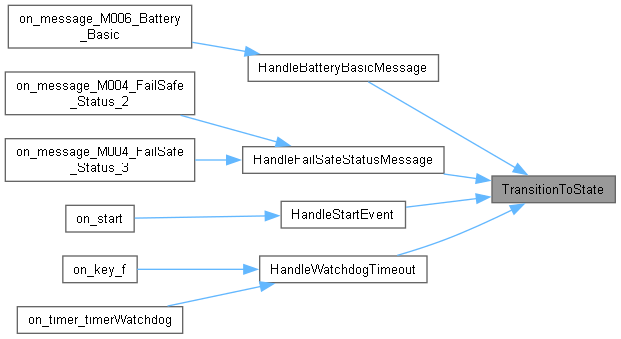
| void | TransitionToState (enum SystemState newState) |
| 시스템 상태를 새로운 상태로 전환하는 함수 | |
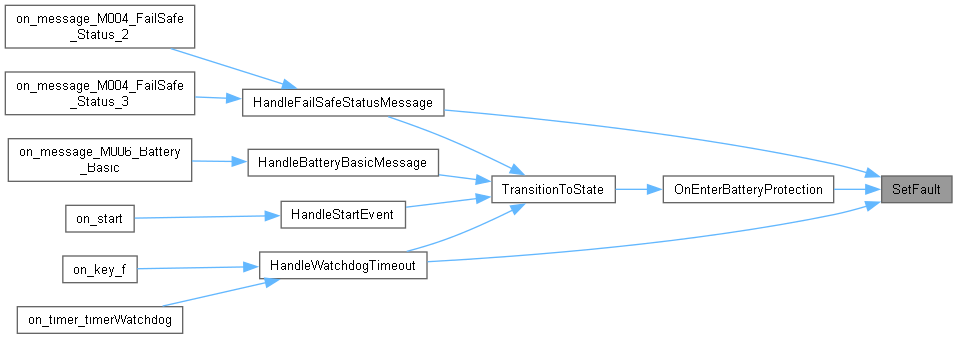
| void | SetFault (dword faultBit) |
| 폴트 레지스터에 특정 폴트 비트를 설정하는 함수 | |
| void | ClearFault (dword faultBit) |
| 폴트 레지스터에서 특정 폴트 비트를 해제하는 함수 | |
| void | InitializeGlobals () |
| 시작 시 모든 전역 변수를 기본 상태로 초기화 | |
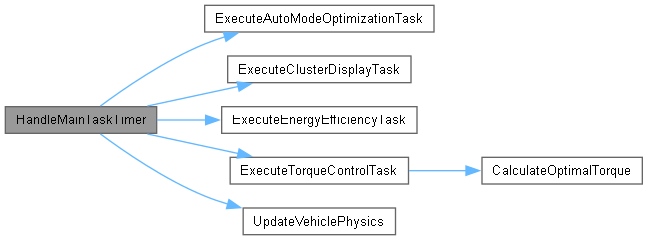
| float | CalculateOptimalTorque () |
| 운전자 입력과 차량 상태를 기반으로 최적의 모터 토크를 계산하는 함수 | |
| void | UpdateVehiclePhysics () |
| 토크 값을 기반으로 차량의 RPM과 속도를 업데이트하는 물리 시뮬레이션 함수 | |
| void | ExecuteTorqueControlTask () |
| 주기적으로 모터 토크 제어 명령을 전송하는 태스크 | |
| void | ExecuteAutoModeOptimizationTask () |
| 자동 모드 최적화 태스크 | |
| void | ExecuteClusterDisplayTask () |
| 클러스터에 표시할 정보를 주기적으로 전송하는 태스크 | |
| void | ExecuteEnergyEfficiencyTask () |
| 에너지 효율 계산(누적 회생 에너지)을 주기적으로 수행하는 태스크 | |
| void | HandleMainTaskTimer () |
| 메인 태스크 타이머 이벤트 발생 시 주기적으로 호출되는 함수 | |
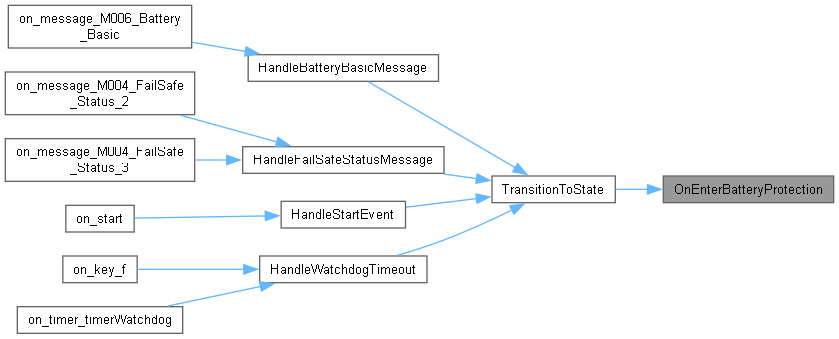
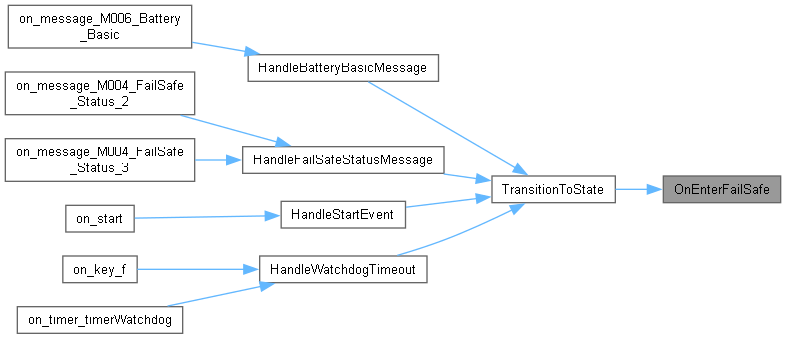
| void | HandleStartEvent () |
| 'on start' 이벤트 핸들러 로직을 처리 | |
| void | HandleStopEvent () |
| 'on stopMeasurement' 이벤트 핸들러 로직을 처리 | |
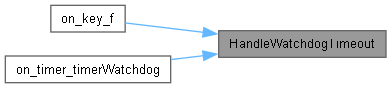
| void | HandleWatchdogTimeout () |
| 워치독 타임아웃 발생 시 호출되는 이벤트 핸들러 | |
| void | SendModeChangeResponse (message M008_Mode_Change_Req request) |
| 회생제동 모드 변경 요청에 대한 응답 메시지를 전송하는 함수 | |
| void | HandleModeChangeReqMessage (message M008_Mode_Change_Req msg) |
| 'on message M008_Mode_Change_Req' 이벤트 핸들러 로직을 처리 | |
| void | HandleBatteryBasicMessage (message M006_Battery_Basic msg) |
| 'on message M006_Battery_Basic' 이벤트 핸들러 로직을 처리 | |
| void | HandleRegenTorqueFeedbackMessage (message M002_Regen_Torque_Feedback msg) |
| 'on message M002_Regen_Torque_Feedback' 이벤트 핸들러 로직을 처리 | |
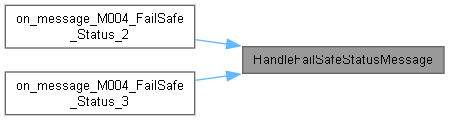
| void | HandleFailSafeStatusMessage (dword faultCode) |
| Fail-Safe 상태 메시지 수신 이벤트 핸들러 로직을 처리 | |
| void | HandleVehicleDynamicsMessage (message M005_Vehicle_Dynamics msg) |
| 'on message M005_Vehicle_Dynamics' 이벤트 핸들러 로직을 처리 | |
| void | HandleBrakePedalMessage (message M005_EXT_Brake_Pedal msg) |
| 'on message M005_EXT_Brake_Pedal' 이벤트 핸들러 로직을 처리 | |
HPC의 모든 함수 정의
| float CalculateOptimalTorque | ( | ) |
운전자 입력과 차량 상태를 기반으로 최적의 모터 토크를 계산하는 함수

폴트 레지스터에서 특정 폴트 비트를 해제하는 함수
| faultBit | 해제할 폴트 비트 |
| void ExecuteAutoModeOptimizationTask | ( | ) |
자동 모드 최적화 태스크

| void ExecuteClusterDisplayTask | ( | ) |
클러스터에 표시할 정보를 주기적으로 전송하는 태스크

| void ExecuteEnergyEfficiencyTask | ( | ) |
| void ExecuteTorqueControlTask | ( | ) |
주기적으로 모터 토크 제어 명령을 전송하는 태스크


| void HandleBatteryBasicMessage | ( | message M006_Battery_Basic | msg | ) |
'on message M006_Battery_Basic' 이벤트 핸들러 로직을 처리
| msg | 수신된 메시지 |


| void HandleBrakePedalMessage | ( | message M005_EXT_Brake_Pedal | msg | ) |
'on message M005_EXT_Brake_Pedal' 이벤트 핸들러 로직을 처리
| msg | 수신된 메시지 |

Fail-Safe 상태 메시지 수신 이벤트 핸들러 로직을 처리
| faultCode | 수신된 폴트 코드 |
| void HandleMainTaskTimer | ( | ) |
메인 태스크 타이머 이벤트 발생 시 주기적으로 호출되는 함수

| void HandleModeChangeReqMessage | ( | message M008_Mode_Change_Req | msg | ) |
'on message M008_Mode_Change_Req' 이벤트 핸들러 로직을 처리
| msg | 수신된 메시지 |


| void HandleRegenTorqueFeedbackMessage | ( | message M002_Regen_Torque_Feedback | msg | ) |
'on message M002_Regen_Torque_Feedback' 이벤트 핸들러 로직을 처리
| msg | 수신된 메시지 |

| void HandleStartEvent | ( | ) |
'on start' 이벤트 핸들러 로직을 처리

| void HandleStopEvent | ( | ) |
'on stopMeasurement' 이벤트 핸들러 로직을 처리

| void HandleVehicleDynamicsMessage | ( | message M005_Vehicle_Dynamics | msg | ) |
'on message M005_Vehicle_Dynamics' 이벤트 핸들러 로직을 처리
| msg | 수신된 메시지 |

| void HandleWatchdogTimeout | ( | ) |
워치독 타임아웃 발생 시 호출되는 이벤트 핸들러

| void InitializeGlobals | ( | ) |
시작 시 모든 전역 변수를 기본 상태로 초기화

| void OnEnterBatteryProtection | ( | ) |
배터리 보호 상태 진입 시 호출되는 함수

| void OnEnterFailSafe | ( | ) |
Fail-Safe 상태 진입 시 호출되는 함수
| void OnEnterNormal | ( | ) |
정상 상태 진입 시 호출되는 함수

| void SendModeChangeResponse | ( | message M008_Mode_Change_Req | request | ) |
회생제동 모드 변경 요청에 대한 응답 메시지를 전송하는 함수
| request | 수신된 모드 변경 요청 메시지 |

폴트 레지스터에 특정 폴트 비트를 설정하는 함수
| faultBit | 설정할 폴트 비트 |
| void TransitionToState | ( | enum SystemState | newState | ) |
시스템 상태를 새로운 상태로 전환하는 함수
| newState | 새로운 시스템 상태 |
| void UpdateVehiclePhysics | ( | ) |
토크 값을 기반으로 차량의 RPM과 속도를 업데이트하는 물리 시뮬레이션 함수

